ARAL 架构设计与模块调用流程
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2025.11.25 | V1.0 | 完整架构设计与调用流程文档 | 刘刚 |
[TOC]
1. 架构总览
1.1 设计理念
ARAL(AUBO Robot Algorithm Library)采用分层模块化架构,遵循以下设计原则:
- 单一职责原则(SRP): 每个模块负责且仅负责一个独立的功能领域
- 依赖倒置原则(DIP): 高层模块不依赖底层实现,而是依赖抽象接口
- 开闭原则(OCP): 对扩展开放,对修改封闭
- 工厂模式(Factory): Scene 作为统一的工厂入口,管理所有模块的创建与生命周期
1.2 核心概念
1.2.1 架构层次关系
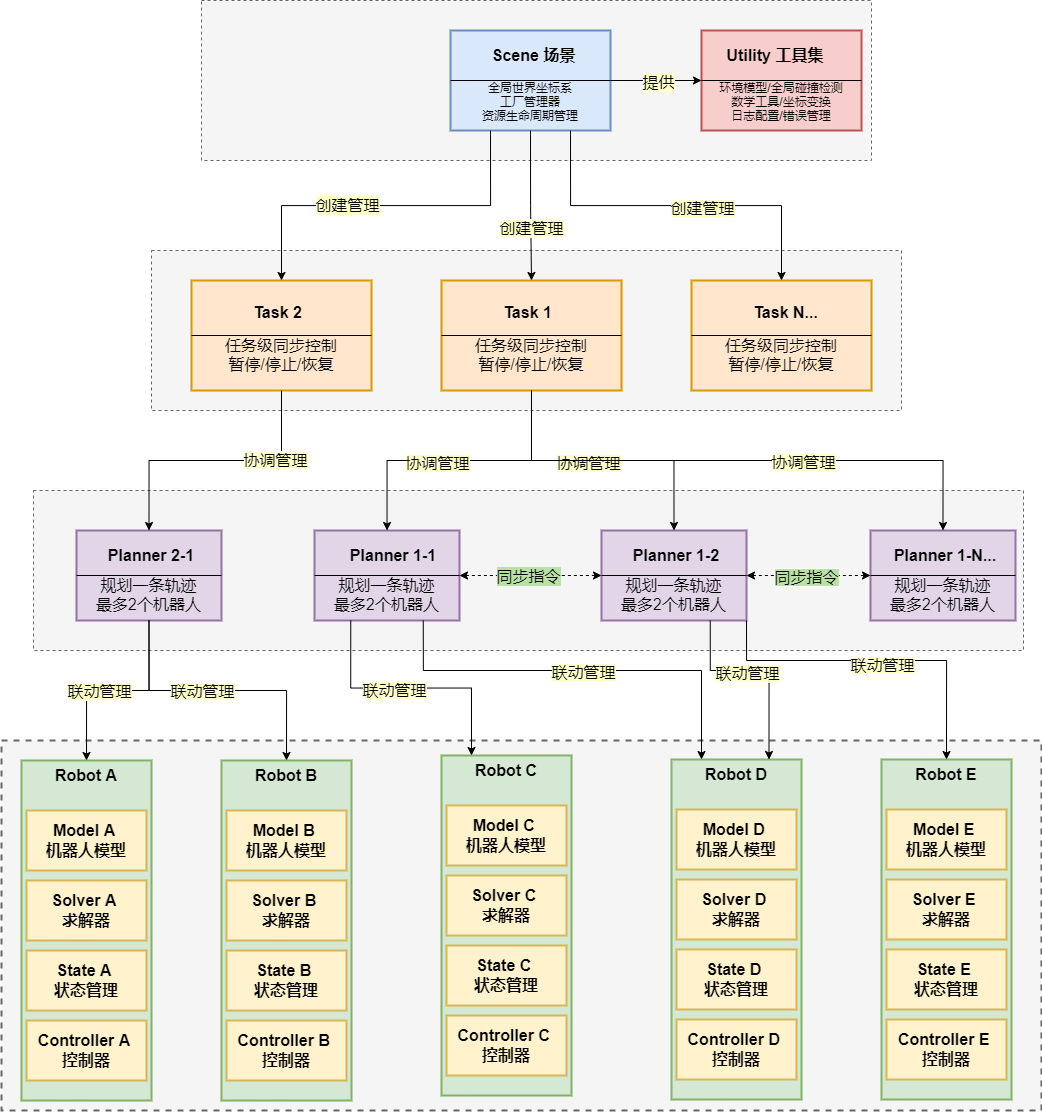
1.2.2 架构说明
层级结构:
层级 0 - Scene(场景层):
- 全局唯一的世界坐标系
- 所有资源的工厂和生命周期管理器
- 提供Utility工具集
层级 1 - Task(任务层):
- 一个Scene可以有多个Task
- 负责场景级的同步控制(暂停、停止、恢复)
- 协调多个Planner的执行
层级 2 - Planner(规划器层):
- 一个Task可以管理多个Planner
- 每个Planner只规划一个运动轨迹
- 每个Planner至多包含两个机器人(主从、联动、同步等)
- Planner之间可以执行同步指令(同启同停)
层级 3 - Robot(机器人层):
- 每个机器人由Scene创建和管理
- 每个机器人拥有专属的4个模块:
- Model: 机器人物理模型和参数
- Solver: 无状态的计算引擎
- State: 实时状态管理器
- Controller: 控制算法实现
- 一个机器人可以同时被多个Planner调度
关键特性:
- 多任务并行: 同一个Scene中可以运行多个Task,实现复杂的生产流程
- 多规划器协同: 同一个Task中的多个Planner可以同步执行
- 机器人复用: 同一个机器人可以被不同Task的Planner调度(时分复用)
- 模块专属: 每个机器人的Model/Solver/State/Controller是专属的,保证状态隔离
2. 模块详解
2.1 Scene(场景)
职责: 全局场景管理器和工厂
核心功能:
- 维护唯一的世界坐标系
- 管理多个机器人实例
- 管理环境物体
- 创建和销毁所有子模块
- 级联生命周期管理
关键接口:
class Scene {
// 机器人模型管理
ModelHandle rlCreateRobotModel(const std::string& robot_name, const std::string& path);
int rlDestroyRobotModel(const ModelHandle& handle);
ModelPtr rlGetRobotModel(const ModelHandle& handle);
// 获取工具模块
UtilityPtr rlGetUtility();
SolverPtr rlGetRobotSolver(const ModelHandle& handle);
// 状态管理
StateHandle rlCreateRobotState(const ModelHandle& handle, const std::string& state_name);
StatePtr rlGetRobotState(const StateHandle& handle);
// 控制与规划
ControllerPtr rlCreateRobotController(const StateHandle& handle, const std::string& name);
PlannerHandle rlCreateRobotPlanner(const std::vector<RobotRole>& robots, const std::string& name);
PlannerPtr rlGetRobotPlanner(const PlannerHandle& handle);
// 任务管理
TaskPtr rlCreateRobotTask(const std::vector<PlannerHandle>& handles, const std::string& name);
};
使用场景:
// 创建全局唯一场景
auto scene = CreateARALScene("production_line");
// 场景内添加两个机器人
auto model_A_h = scene->rlCreateRobotModel("robot_A", "/path/A/");
auto model_B_h = scene->rlCreateRobotModel("robot_B", "/path/B/");
// 销毁机器人A(级联删除所有依赖模块)
scene->rlDestroyRobotModel(model_A_h);
2.2 Utility(工具集)
职责: 提供独立于机器人的通用算法和工具
核心功能:
- 日志管理(等级、回调)
- 错误码查询
- 版本信息
- 库配置
- 数学工具(向量运算、坐标变换)
- 滤波器(低通、卡尔曼、巴特沃斯、陷波)
- 几何工具(平面定义、距离计算)
关键接口:
class Utility {
// 日志与配置
int rlSetLogLevel(const LogLevel& level);
int rlSetLogHandler(const LogHandler& logFunc);
const std::string rlGetErrorDescription(const int errCode) const;
// 数学工具
RLPose utlChangeReferenceFrame(const RLPose& F_b_a, const RLPose& F_c_b) const;
RLTwist utlCalDifferPose(const RLPose& F_a_b1, const RLPose& F_a_b2) const;
// 滤波器
int utlLowpassFilter(const double& sample_time, const double& cutoff_frequency, ...);
int utlKalmanFilter(const double& Q, const double& R, ...);
int utlButterFilter(const int& order, const double& fd, const double& fs, ...);
// 环境物体管理
int utlSetWorldObject(const std::string& object_id, const RLPose& pose, ...);
int utlUnsetWorldObject(const std::string& object_id);
};
使用场景:
auto utility = scene->rlGetUtility();
// 设置日志
utility->rlSetLogLevel(LogLevel::INFO);
// 坐标变换
RLPose F_b_a = {0, 0, 0, 0, 0, 0};
RLPose F_c_b = {1, 0, 0, 0, 0, 0};
RLPose F_c_a = utility->utlChangeReferenceFrame(F_b_a, F_c_b);
// 添加环境物体
utility->utlSetWorldObject("table", pose, shapes, origins);
2.3 Model(机器人模型)
职责: 描述机器人的物理结构和参数("机器人是什么")
核心功能:
- 机器人结构描述(DOF、DH参数)
- 坐标系管理(工具、工件、传感器)
- 动力学参数(质量、惯量、摩擦)
- 运动限制(位置、速度、力矩)
- 功率限制
- 碰撞几何模型
关键接口:
class Model {
// 基本信息
unsigned int mdlGetRobotDOF() const;
int mdlSetRobotDHParameterError(const std::vector<DHParameter>& error);
// 坐标系管理
int mdlSetToolPose(const RLPose& pose);
int mdlGetToolPose(RLPose& pose);
int mdlSetWorkpiecePose(const RLPose& pose);
int mdlGetWorkpiecePose(RLPose& pose);
int mdlEnableRemoteTool(const bool enable);
// 动力学参数
int mdlSetRobotLinkDynamicParameter(const std::vector<double>& real_para);
std::vector<double> mdlGetRobotLinkDynamicParameter();
int mdlSetLoadDynamicParameterInFlange(const RLInertia& inertia);
int mdlSetJointFrictionParameter(const std::vector<FrictionParam>& friPara);
// 运动限制
int mdlSetJointPositionRange(const RLJntArray& upperLimit, const RLJntArray& lowerLimit);
const RLJntArray mdlGetJointMaximumVelocity();
int mdlSetJointStartStopTorque(const RLJntArray& startStopTorque);
// 碰撞几何
int mdlSetLinkCollisionGeometryModel(const std::string& link_name, ...);
std::vector<OBBPairs> mdlGetLinkOBBModel(const std::string& link_name) const;
};
使用场景:
auto model = scene->rlGetRobotModel(model_handle);
// 配置工具和工件
RLPose tool_pose = {0, 0, 0.1, 0, 0, 0}; // 工具偏移100mm
model->mdlSetToolPose(tool_pose);
RLPose workpiece_pose = {0.5, 0, 0.5, 0, 0, 0}; // 工件位置
model->mdlSetWorkpiecePose(workpiece_pose);
// 设置负载参数
RLInertia load = {5.0, {0, 0, 0.05}, ...}; // 5kg负载
model->mdlSetLoadDynamicParameterInFlange(load);
// 设置运动限制
RLJntArray max_vel = {3.14, 3.14, 3.14, 3.14, 3.14, 3.14};
model->mdlSetJointPositionRange(upper, lower);
2.4 Solver(求解器)
职责: 提供无状态的计算引擎("计算什么")
核心功能:
- 运动学计算(正运动学、逆运动学、雅可比)
- 动力学计算(逆动力学、正动力学、重力补偿)
- 碰撞检测与距离计算
- 工作空间分析
- 标定算法(运动学、动力学)
关键接口:
class Solver {
// 正运动学
int kdCalForwardPosition(const RLJntArray& q_in, const RLPose& T_f_e,
const bool& real_fk, RLPose& T_b_e) const;
int kdCalForwardVelocity(const RLJntArray& q_in, const RLJntArray& dq_in,
const RLPose& T_f_e, RLTwist& v_b_e) const;
// 逆运动学
int kdCalInversePosition(const IKConfigInfo& config, const RLPose& T_f_e,
const bool& real_ik, RLJntArray& q_out) const;
int kdCalAllInversePositions(const IKConfigInfo& config, const RLPose& T_f_e,
const bool& real_ik, std::vector<RLJntArray>& q_out) const;
int kdCalInverseVelocity(const RLJntArray& q_in, const RLTwist& v_in,
const RLPose& T_f_e, RLJntArray& dq_out) const;
// 动力学
int kdCalInverseDynamics(const RLJntArray& joint_pos, const RLJntArray& joint_vel,
const RLJntArray& joint_acc, const RLPose& T_f_e,
const std::vector<RLWrench>& ft_ext, RLJntArray& joint_torque) const;
int kdCalGravityTorque(const RLJntArray& q, const RLInertia& payload,
RLJntArray& robot_gravity, RLJntArray& payload_gravity) const;
// 碰撞检测
int kdCheckRobotCollision(const RLJntArray& joint, const bool& checkSelf,
GeometryCollisionResult& result) const;
int kdCalMinimumDistance(const RLJntArray& joint, const double& threshold,
const bool& checkSelf, GeometryDistanceResult& result) const;
// 标定
int calibEndFramePosInFlange(const std::vector<RLPose>& F_b_f_calib_point,
Array3d& P_f_end, double& error);
int calibToolDynamicParameter(const CalibTrajectoryFeature& traj_feature,
const DoubleVecVec& data_raw, ToolCalibResult& result);
};
使用场景:
auto solver = scene->rlGetRobotSolver(model_handle);
// 正运动学
RLJntArray q = {0, 0, 0, 0, 0, 0};
RLPose tcp_pose;
solver->kdCalForwardPosition(q, tool_pose, false, tcp_pose);
// 逆运动学
IKConfigInfo ik_config;
ik_config.target_pose = {0.5, 0, 0.5, 0, 0, 0};
ik_config.ref_joint = {0, 0, 0, 0, 0, 0};
RLJntArray q_sol;
int ret = solver->kdCalInversePosition(ik_config, tool_pose, false, q_sol);
// 碰撞检测
GeometryCollisionResult collision_result;
solver->kdCheckRobotCollision(q, true, collision_result);
if (collision_result.collision) {
std::cout << "Collision detected!" << std::endl;
}
// 动力学
RLJntArray torque;
solver->kdCalInverseDynamics(q, qd, qdd, tool_pose, ft_ext, torque);
设计特点:
- ✅ 完全无状态: 所有函数都是 const 成员函数
- ✅ 纯计算: 只依赖输入参数,不保存任何中间状态
- ✅ 易于测试: 可以独立测试,不需要复杂的上下文
- ✅ 线程安全: 天然支持多线程并发调用
2.5 State(状态)
职责: 跟踪和管理机器人的实时状态("机器人在哪")
核心功能:
- 关节状态更新(位置、速度、加速度、力矩、温度)
- 传感器数据更新(末端力、底座力、关节力)
- 参考轨迹设置
- 外力估计与碰撞检测
- 速度限制管理
- 奇异性监测
关键接口:
class State {
// 状态初始化
int rsInitiateRobotState(const RLJntArray& q, const RLJntArray& qd,
const RLJntArray& qdd, const ToolWorkpiece& t_w);
// 关节状态更新(周期性调用)
int rsUpdateJointState(const RLJntArray& q, const RLJntArray& qd,
const RLJntArray& qdd, const RLJntArray& torque,
const RLJntArray& temperature, const RLJntArray& friction,
const bool& is_user_acc = false);
// 传感器数据更新
int rsUpdateFTSensorData(const FTSensorType& type, const double* data);
// 参考轨迹设置
int rsSetReferenceTrajectory(const bool& has_ref_traj,
const TrajectoryPoint& point = TrajectoryPoint());
// 速度限制
int rsSetJointMaximumSpeed(const RLJntArray& speed);
int rsSetEndMaximumSpeedInBase(const Array2d& speed);
// 状态查询
const RLPose rsGetEndPoseInBase() const;
const RLWrench rsGetEndExternalWrenchInBase() const;
const RLWrench rsGetEndExternalWrenchInEnd() const;
const RLJntArray rsGetJointExternalTorque() const;
const RLJntArray rsGetJointDynamicTorque() const;
const SingularProperty rsGetSingularityProperty();
};
使用场景:
auto state = scene->rlGetRobotState(state_handle);
// 初始化状态
RLJntArray q0 = {0, 0, 0, 0, 0, 0};
RLJntArray qd0 = {0, 0, 0, 0, 0, 0};
RLJntArray qdd0 = {0, 0, 0, 0, 0, 0};
ToolWorkpiece tw; // 工具和工件信息
state->rsInitiateRobotState(q0, qd0, qdd0, tw);
// 周期性更新(控制周期:5ms)
while (running) {
// 从硬件读取关节状态
RLJntArray q, qd, qdd, torque, temp, friction;
robot_hardware->getJointState(q, qd, torque, temp);
// 更新状态
state->rsUpdateJointState(q, qd, qdd, torque, temp, friction);
// 更新力传感器数据
double ft_data[6];
ft_sensor->read(ft_data);
state->rsUpdateFTSensorData(FTSensorType::END_FT_SENSOR, ft_data);
// 查询末端位姿
RLPose tcp_pose = state->rsGetEndPoseInBase();
// 查询外力
RLWrench external_wrench = state->rsGetEndExternalWrenchInEnd();
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
设计特点:
- 🔄 实时性: 支持高频率(200Hz)状态更新
- 📊 状态估计: 内部集成卡尔曼滤波进行状态估计
- 🛡️ 安全监测: 自动进行速度、奇异性监测
2.6 Controller(控制器)
职责: 实现各种控制算法(位置控制、力控制、阻抗控制等)
核心功能:
- 控制模式切换(位置、导纳、阻抗)
- 力控参数设置(刚度、阻尼、质量)
- 安全速度限制
- 奇异防护
- 振动抑制
关键接口:
class Controller {
// 控制初始化
int mcInitiateControlPara(const DescribeSpace& space, const RLPose& frame);
int mcSetControlType(const ControlMode& type);
// 力控参数
int fcSetStiffness(const DescribeSpace& space, const double* stiffness);
int fcSetDamp(const DescribeSpace& space, const double* damp);
int fcSetMass(const DescribeSpace& space, const double* mass);
int fcSetGoalForce(const DescribeSpace& space, const RLPose& frame, const RLWrench& force);
// 安全限制
int mcSetSafetyJointSpeed(const RLJntArray& speed);
int mcSetSafetyTranslationSpeed(const double& vel);
int mcSetSafetyRotationSpeed(const double& rot);
// 振动抑制
int mcSetVibSuppressParams(const int& level, const DoubleVec& omega, const DoubleVec& zeta);
};
使用场景:
auto controller = scene->rlCreateRobotController(state_handle, "force_ctrl");
// 配置力控模式
controller->mcSetControlType(ControlMode::ADMITTANCE);
// 设置笛卡尔刚度和阻尼
double stiffness[6] = {500, 500, 1000, 50, 50, 50}; // N/m, Nm/rad
double damp[6] = {50, 50, 100, 5, 5, 5}; // N*s/m, Nm*s/rad
controller->fcSetStiffness(DescribeSpace::CARTESIAN, stiffness);
controller->fcSetDamp(DescribeSpace::CARTESIAN, damp);
// 设置目标力
RLWrench target_force = {0, 0, -20, 0, 0, 0}; // Z方向20N压力
RLPose frame = {0, 0, 0, 0, 0, 0}; // 基坐标系
controller->fcSetGoalForce(DescribeSpace::CARTESIAN, frame, target_force);
2.7 Planner(规划器)
职责: 生成机器人的运动轨迹("去哪里")
核心功能:
- 路径添加(直线、圆弧、样条、关节)
- 轨迹规划(速度、加速度规划)
- 路径交融(blending)
- 避障规划
- 轨迹跟踪
- 速度调整
关键接口:
class Planner {
// 规划器配置
int tpSetPlannerCapacity(const PlannerCapacity& type, const unsigned int& size);
unsigned int tpGetPlannerCapacity(const PlannerCapacity& type) const;
int tpGetPlannerDepth(const PlannerQueue& queue) const;
// 路径添加
int tpAddPositionLine(const PathPoint& point, const PathProperty& path_property,
const MoveProperty& move_property);
int tpAddPoints(const std::vector<PathPoint>& points, const PathProperty& path_property,
const MoveProperty& move_property, const ToolWorkpiece& tool_workpiece);
int tpAddVelocityLine(const int& id, const DescribeSpace& space,
const MoveProperty& move_property, const ToolWorkpiece& tool_workpiece);
int tpSetEndPath(); // 终止交融
// 轨迹跟踪
int tpTargetMotionTracking(const PathPoint& point, const MoveProperty& move_property,
const ToolWorkpiece& tool_workpiece, const unsigned int buffSize,
const bool verbose = true);
double tpTrajectoryTracking(const PathPoint& point, const MoveProperty& move_property,
const ToolWorkpiece& tool_workpiece, const double& smooth_scale,
const double& delay_sacle, const TrajectoryTrackingStatus& status);
// 避障规划
int tpGenerateCollisionFreePoints(const std::vector<PathPoint>& in_points,
const ObstacleAvoidanceParameters& obstacle_avoidance_params,
const ToolWorkpiece& tool_workpiece,
std::vector<PathPoint>& out_points);
// 状态查询
double tpGetMoveDuration(const double& pathId) const;
double tpGetPlannerLeftMoveDuration() const;
int tpGetPausedPoint(TrajectoryPoint& point, const Array2d& ik_eps);
int tpGetPathPointAtGivenTime(const double& sample_period, const unsigned int& n,
std::vector<PathPoint>& points) const;
// 恢复运动
int tpSetResumePoint(const PathPoint& from, const PathProperty& path_property,
const MoveProperty& move_property);
};
使用场景:
auto planner = scene->rlGetRobotPlanner(planner_handle);
// 配置规划器
planner->tpSetPlannerCapacity(PlannerCapacity::LookAhead, 10);
// 添加直线运动
PathPoint target1;
target1.describe_space = DescribeSpace::CARTESIAN;
target1.path_id = 1;
target1.pose = {0.5, 0, 0.5, 0, 0, 0};
PathProperty path_prop;
path_prop.describe_space = DescribeSpace::CARTESIAN;
path_prop.blend_radius = 0.01; // 10mm交融半径
MoveProperty move_prop;
move_prop.max_vel = {0.5, 3.14}; // 线速度0.5m/s, 角速度3.14rad/s
move_prop.max_acc = {1.0, 6.28};
planner->tpAddPositionLine(target1, path_prop, move_prop);
// 添加圆弧运动
PathPoint via, target2;
via.pose = {0.6, 0.1, 0.5, 0, 0, 0};
target2.pose = {0.7, 0, 0.5, 0, 0, 0};
std::vector<PathPoint> arc_points = {target1, via, target2};
planner->tpAddPoints(arc_points, path_prop, move_prop, tool_workpiece);
// 结束路径交融
planner->tpSetEndPath();
2.8 Task(任务管理器)
职责: 协调多个规划器的执行("怎么协调")
核心功能:
- 任务状态管理(运行、暂停、停止)
- 多规划器同步控制
- 轨迹点采样
- 速度全局调整
- 异常处理
关键接口:
class Task {
// 任务控制
int tskSetTaskState(const TaskState& state);
TaskState tskGetTaskState() const;
int tskSetCycle(const double& period);
// 同步控制
int tskSyncMoveOn(); // 开启同步运动
int tskWaitSyncMove(); // 等待同步运动
// 速度控制
int tskSetCartesianVelocityLimits(const Array2d& cartesianVelLimits,
const unsigned int buffSize);
int tskSetVelocityScaleFactor(const double& velScal, const unsigned int buffSize);
const Array2d tskGetCartesianVelocityLimits() const;
double tskGetVelocityScaledFactor();
// 轨迹采样(周期性调用)
int tskUpdateCycle(const double& cycle, std::vector<TrajectoryPoint>& point,
PlannerHandle& failed_planner);
// 停止与恢复
int tskStop(const StopType& type, const double& acc_ratio, const unsigned int buffSize);
int tskResume();
// 状态查询
double tskGetLeftMoveDuration();
};
使用场景:
auto task = scene->rlCreateRobotTask({planner_A_h, planner_B_h}, "sync_task");
// 设置控制周期
task->tskSetCycle(0.005); // 5ms
// 设置速度限制
Array2d vel_limits = {0.5, 3.14}; // 线速度、角速度
task->tskSetCartesianVelocityLimits(vel_limits, 10);
// 开启同步运动
task->tskWaitSyncMove();
planner_A->tpAddPositionLine(target_A, path_prop, move_prop);
planner_B->tpAddPositionLine(target_B, path_prop, move_prop);
task->tskSyncMoveOn(); // A和B同启同停
// 周期性采样轨迹点
std::vector<TrajectoryPoint> trajectory_points;
PlannerHandle failed_planner;
while (running) {
int ret = task->tskUpdateCycle(0.005, trajectory_points, failed_planner);
if (ret == 0) {
// 正常输出轨迹点
robot_A->moveToPoint(trajectory_points[0]);
robot_B->moveToPoint(trajectory_points[1]);
} else if (ret == 40002) {
// 轨迹执行完成
std::cout << "Motion completed!" << std::endl;
break;
} else if (ret < 0) {
// 出错处理
std::cerr << "Error: " << ret << " in planner " << failed_planner << std::endl;
task->tskStop(StopType::EMERGENCY, 1.0, 0);
break;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
3. 模块依赖关系
3.1 管理层次关系(从架构图角度)
层级 0: Scene(场景)
│
├─── Utility(工具集,独立)
│
层级 1: └─── Task 1, Task 2, ... Task N(任务层)
│
层级 2: └─── Planner 1-1, 1-2, ... 1-N(规划器层)
│
层级 3: └─── Robot A, B, C, ...(机器人层)
│
└─── Model, Solver, State, Controller
说明:
- Scene 创建和管理所有 Task
- Task 协调管理多个 Planner(同步控制)
- Planner 调度 Robot(一个Planner最多包含2个Robot)
- Robot 拥有专属的4个模块:Model、Solver、State、Controller
3.2 创建依赖关系(从模块创建角度)
对于单个Robot内部的模块创建,存在以下依赖链:
Scene
│
├─── Model(机器人模型)
│ │
│ ├─── Solver(基于Model创建,无状态计算引擎)
│ │
│ └─── State(基于Model创建,需要Model和Solver)
│ │
│ ├─── Controller(基于State创建)
│ │
│ └─── Planner(基于State创建,可包含多个Robot的State)
│
└─── Task(基于Planner创建,管理多个Planner)
创建顺序规则:
- 先创建
Model(定义机器人"是什么") - 再创建
State(需要依赖Model和Solver) - 然后创建
Planner(需要依赖State) - 最后创建
Task(需要依赖Planner)
3.3 生命周期级联关系
当销毁上层模块时,所有依赖它的下层模块也会被自动销毁:
3.3.1 Robot内部的级联删除
销毁 Model ──> 级联销毁 Solver
──> 级联销毁 State
──> 级联销毁 Controller
──> 级联销毁依赖该State的Planner(该Planner从Task中移除)
3.3.2 Task和Planner的关系
- 销毁Task:不会影响Planner,Planner仍然存在但不再被该Task管理
- 销毁Planner:不会影响Task,Task继续管理其他Planner
- 销毁Robot的Model:会导致依赖该Robot的Planner失效,但Task本身不会被销毁
示例1 - 销毁Robot导致Planner失效:
// 创建完整的依赖链
auto model_h = scene->rlCreateRobotModel("robot_A", path);
auto solver = scene->rlGetRobotSolver(model_h);
auto state_h = scene->rlCreateRobotState(model_h, "state");
auto planner_h = scene->rlCreateRobotPlanner({RobotRole{state_h, MASTER}}, "planner");
auto task = scene->rlCreateRobotTask({planner_h}, "task");
// 销毁 Model 会级联销毁所有依赖
scene->rlDestroyRobotModel(model_h);
// 此时 solver, state 失效,planner_h 对应的Planner失效
// task 本身依然存在,但其管理的planner已失效
示例2 - 多Robot场景的级联删除:
// 创建两个机器人和各自的规划器
auto model_A_h = scene->rlCreateRobotModel("robot_A", path_A);
auto model_B_h = scene->rlCreateRobotModel("robot_B", path_B);
auto state_A_h = scene->rlCreateRobotState(model_A_h, "state_A");
auto state_B_h = scene->rlCreateRobotState(model_B_h, "state_B");
auto planner_A_h = scene->rlCreateRobotPlanner({RobotRole{state_A_h, MASTER}}, "planner_A");
auto planner_B_h = scene->rlCreateRobotPlanner({RobotRole{state_B_h, MASTER}}, "planner_B");
auto task = scene->rlCreateRobotTask({planner_A_h, planner_B_h}, "sync_task");
// 销毁 Robot A
scene->rlDestroyRobotModel(model_A_h);
// planner_A 失效,但 task 和 planner_B 仍然有效
// task->tskUpdateCycle() 只会返回 Robot B 的轨迹点
4. 典型调用流程
4.1 单机器人运动控制流程
// 1. 创建场景
auto scene = CreateARALScene("cell_1");
auto utility = scene->rlGetUtility();
utility->rlSetLogLevel(LogLevel::INFO);
// 2. 创建机器人模型
auto model_h = scene->rlCreateRobotModel("robot_A", "/path/aubo_i5/");
auto model = scene->rlGetRobotModel(model_h);
// 3. 配置机器人参数
RLPose tool_pose = {0, 0, 0.1, 0, 0, 0};
model->mdlSetToolPose(tool_pose);
RLInertia load = {2.0, {0, 0, 0.03}, ...};
model->mdlSetLoadDynamicParameterInFlange(load);
// 4. 创建求解器和状态
auto solver = scene->rlGetRobotSolver(model_h);
auto state_h = scene->rlCreateRobotState(model_h, "real_state");
auto state = scene->rlGetRobotState(state_h);
// 5. 初始化状态
RLJntArray q0 = {0, 0, 0, 0, 0, 0};
ToolWorkpiece tw;
state->rsInitiateRobotState(q0, {0,0,0,0,0,0}, {0,0,0,0,0,0}, tw);
// 6. 创建规划器
auto planner_h = scene->rlCreateRobotPlanner({RobotRole{state_h, MASTER}}, "main_planner");
auto planner = scene->rlGetRobotPlanner(planner_h);
// 7. 添加运动
PathPoint target;
target.describe_space = DescribeSpace::CARTESIAN;
target.pose = {0.5, 0, 0.5, 0, 0, 0};
PathProperty path_prop;
path_prop.describe_space = DescribeSpace::CARTESIAN;
MoveProperty move_prop;
move_prop.max_vel = {0.5, 3.14};
move_prop.max_acc = {1.0, 6.28};
planner->tpAddPositionLine(target, path_prop, move_prop);
// 8. 创建任务
auto task = scene->rlCreateRobotTask({planner_h}, "main_task");
task->tskSetCycle(0.005);
// 9. 控制循环
while (true) {
// 9.1 更新机器人状态
RLJntArray q, qd, torque, temp, friction;
hardware->getJointState(q, qd, torque, temp, friction);
state->rsUpdateJointState(q, qd, {0,0,0,0,0,0}, torque, temp, friction);
// 9.2 获取规划轨迹点
std::vector<TrajectoryPoint> traj_points;
PlannerHandle failed_h;
int ret = task->tskUpdateCycle(0.005, traj_points, failed_h);
if (ret == 0 && !traj_points.empty()) {
// 9.3 下发轨迹点
hardware->setJointCommand(traj_points[0].joint_pos,
traj_points[0].joint_vel,
traj_points[0].joint_acc);
} else if (ret == 40002) {
std::cout << "Motion completed!" << std::endl;
break;
} else if (ret < 0) {
std::cerr << "Planning error: " << ret << std::endl;
task->tskStop(StopType::EMERGENCY, 1.0, 0);
break;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
4.2 多机器人协同运动流程(同步不联动)
参考 3.17.多机同步规划说明.md 中的场景三。
// 1. 创建场景
auto scene = CreateARALScene("dual_arm_cell");
// 2. 创建两个机器人
auto model_A_h = scene->rlCreateRobotModel("robot_A", "/path/A/");
auto model_B_h = scene->rlCreateRobotModel("robot_B", "/path/B/");
// 3. 创建状态
auto state_A_h = scene->rlCreateRobotState(model_A_h, "state_A");
auto state_B_h = scene->rlCreateRobotState(model_B_h, "state_B");
auto state_A = scene->rlGetRobotState(state_A_h);
auto state_B = scene->rlGetRobotState(state_B_h);
// 4. 初始化状态
RLJntArray q_A0 = {0, 0, 0, 0, 0, 0};
RLJntArray q_B0 = {0, 0, 0, 0, 0, 0};
ToolWorkpiece tw;
state_A->rsInitiateRobotState(q_A0, {0,0,0,0,0,0}, {0,0,0,0,0,0}, tw);
state_B->rsInitiateRobotState(q_B0, {0,0,0,0,0,0}, {0,0,0,0,0,0}, tw);
// 5. 为每个机器人创建独立规划器
auto planner_A_h = scene->rlCreateRobotPlanner(
{RobotRole{state_A_h, PlannerRole::MASTER}}, "planner_A");
auto planner_B_h = scene->rlCreateRobotPlanner(
{RobotRole{state_B_h, PlannerRole::MASTER}}, "planner_B");
auto planner_A = scene->rlGetRobotPlanner(planner_A_h);
auto planner_B = scene->rlGetRobotPlanner(planner_B_h);
// 6. 创建同步任务(关键:一个Task管理两个Planner)
auto task_sync = scene->rlCreateRobotTask({planner_A_h, planner_B_h}, "sync_task");
task_sync->tskSetCycle(0.005);
// 7. 添加同步运动
task_sync->tskWaitSyncMove(); // 开始同步运动
// 机器人A: 走一条直线
PathPoint target_A;
target_A.describe_space = DescribeSpace::CARTESIAN;
target_A.pose = {0.5, 0, 0.5, 0, 0, 0};
planner_A->tpAddPositionLine(target_A, path_prop, move_prop);
// 机器人B: 走一条直线和一条圆弧
PathPoint target_B1, via_B, target_B2;
target_B1.pose = {-0.5, 0, 0.5, 0, 0, 0};
via_B.pose = {-0.6, 0.1, 0.5, 0, 0, 0};
target_B2.pose = {-0.7, 0, 0.5, 0, 0, 0};
planner_B->tpAddPositionLine(target_B1, path_prop, move_prop);
std::vector<PathPoint> arc = {target_B1, via_B, target_B2};
planner_B->tpAddPoints(arc, path_prop, move_prop, tw);
task_sync->tskSyncMoveOn(); // 结束同步运动定义,A和B将同启同停
// 8. 控制循环
while (true) {
// 8.1 更新两个机器人的状态
RLJntArray q_A, qd_A, torque_A, temp_A, friction_A;
RLJntArray q_B, qd_B, torque_B, temp_B, friction_B;
hardware_A->getJointState(q_A, qd_A, torque_A, temp_A, friction_A);
hardware_B->getJointState(q_B, qd_B, torque_B, temp_B, friction_B);
state_A->rsUpdateJointState(q_A, qd_A, {0,0,0,0,0,0}, torque_A, temp_A, friction_A);
state_B->rsUpdateJointState(q_B, qd_B, {0,0,0,0,0,0}, torque_B, temp_B, friction_B);
// 8.2 获取同步轨迹点(关键:一次返回两个机器人的轨迹点)
std::vector<TrajectoryPoint> traj_points; // [point_A, point_B]
PlannerHandle failed_h;
int ret = task_sync->tskUpdateCycle(0.005, traj_points, failed_h);
if (ret == 0 && traj_points.size() == 2) {
// 8.3 同时下发两个机器人的轨迹点
hardware_A->setJointCommand(traj_points[0].joint_pos,
traj_points[0].joint_vel,
traj_points[0].joint_acc);
hardware_B->setJointCommand(traj_points[1].joint_pos,
traj_points[1].joint_vel,
traj_points[1].joint_acc);
} else if (ret == 40002) {
std::cout << "Synchronized motion completed!" << std::endl;
break;
} else if (ret < 0) {
std::cerr << "Sync error: " << ret << " in planner " << failed_h << std::endl;
task_sync->tskStop(StopType::EMERGENCY, 1.0, 0);
break;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
4.3 多机器人联动运动流程(联动不同步)
参考 3.17.多机同步规划说明.md 中的场景二。
// 场景:机器人A(旋转台)带动工件,机器人B的工具在工件上作业
// 1-4步同上(创建场景、模型、状态)
// 5. 创建联动规划器(关键:B是MASTER,A是REFERENCE或SLAVE)
bool A_independent = true; // A是否独立规划
PlannerHandle planner_A_h, planner_B_h;
if (A_independent) {
// 情况1:A独立规划
planner_A_h = scene->rlCreateRobotPlanner(
{RobotRole{state_A_h, PlannerRole::MASTER}}, "planner_A");
planner_B_h = scene->rlCreateRobotPlanner(
{RobotRole{state_A_h, PlannerRole::SLAVE}, // A作为从动
RobotRole{state_B_h, PlannerRole::MASTER}}, "planner_B");
} else {
// 情况2:A由外部控制
planner_B_h = scene->rlCreateRobotPlanner(
{RobotRole{state_A_h, PlannerRole::REFERENCE}, // A仅作参考
RobotRole{state_B_h, PlannerRole::MASTER}}, "planner_B");
}
auto planner_B = scene->rlGetRobotPlanner(planner_B_h);
// 6. 添加运动(B在工件坐标系下规划)
// B的工具在工件坐标系下走正方形
PathPoint corner1, corner2, corner3, corner4;
corner1.describe_space = DescribeSpace::CARTESIAN;
corner1.pose = {0.1, 0.1, 0, 0, 0, 0}; // 工件坐标系
corner2.pose = {0.1, -0.1, 0, 0, 0, 0};
corner3.pose = {-0.1, -0.1, 0, 0, 0, 0};
corner4.pose = {-0.1, 0.1, 0, 0, 0, 0};
planner_B->tpAddPositionLine(corner1, path_prop, move_prop);
planner_B->tpAddPositionLine(corner2, path_prop, move_prop);
planner_B->tpAddPositionLine(corner3, path_prop, move_prop);
planner_B->tpAddPositionLine(corner4, path_prop, move_prop);
planner_B->tpAddPositionLine(corner1, path_prop, move_prop);
// 7. 创建任务
TaskPtr task_coord;
if (A_independent) {
task_coord = scene->rlCreateRobotTask({planner_A_h, planner_B_h}, "coord_task");
} else {
task_coord = scene->rlCreateRobotTask({planner_B_h}, "coord_task");
}
// 8. 控制循环
while (true) {
// 8.1 更新状态
if (A_independent) {
// A自己规划,正常更新
state_A->rsUpdateJointState(q_A, qd_A, qdd_A, torque_A, temp_A, friction_A);
} else {
// A由外部控制,必须更新A的状态供B参考
state_A->rsUpdateJointState(q_A, qd_A, qdd_A, torque_A, temp_A, friction_A);
}
state_B->rsUpdateJointState(q_B, qd_B, qdd_B, torque_B, temp_B, friction_B);
// 8.2 获取轨迹点
std::vector<TrajectoryPoint> traj_points;
PlannerHandle failed_h;
int ret = task_coord->tskUpdateCycle(0.005, traj_points, failed_h);
if (ret == 0) {
if (A_independent && traj_points.size() == 2) {
// A和B都有轨迹点
hardware_A->setJointCommand(traj_points[0]);
hardware_B->setJointCommand(traj_points[1]);
} else if (!A_independent && traj_points.size() == 1) {
// 只有B有轨迹点,A由外部控制
hardware_B->setJointCommand(traj_points[0]);
}
} else if (ret == 40002) {
std::cout << "Coordinated motion completed!" << std::endl;
break;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
4.4 力控制流程
// 1-5步同上(创建场景、模型、求解器、状态)
// 6. 创建控制器
auto controller = scene->rlCreateRobotController(state_h, "force_controller");
// 7. 配置力控参数
controller->mcInitiateControlPara(DescribeSpace::CARTESIAN, {0,0,0,0,0,0});
controller->mcSetControlType(ControlMode::ADMITTANCE);
// 设置刚度(笛卡尔空间)
double stiffness[6] = {500, 500, 1000, 50, 50, 50}; // N/m, Nm/rad
controller->fcSetStiffness(DescribeSpace::CARTESIAN, stiffness);
// 设置阻尼
double damp[6] = {50, 50, 100, 5, 5, 5}; // N*s/m, Nm*s/rad
controller->fcSetDamp(DescribeSpace::CARTESIAN, damp);
// 设置选择向量(只在Z方向力控)
int selection[6] = {0, 0, 1, 0, 0, 0}; // 只控制Z方向
controller->fcSetSelectionVector(DescribeSpace::CARTESIAN, selection);
// 设置目标力
RLWrench target_force = {0, 0, -20, 0, 0, 0}; // Z方向20N压力
RLPose task_frame = {0, 0, 0, 0, 0, 0}; // 基坐标系
controller->fcSetGoalForce(DescribeSpace::CARTESIAN, task_frame, target_force);
// 8. 创建规划器(位置规划+力控制)
auto planner_h = scene->rlCreateRobotPlanner({RobotRole{state_h, MASTER}}, "force_planner");
auto planner = scene->rlGetRobotPlanner(planner_h);
// 添加接触运动(先移动到接触点上方)
PathPoint approach_point, contact_point;
approach_point.describe_space = DescribeSpace::CARTESIAN;
approach_point.pose = {0.5, 0, 0.6, 0, 0, 0}; // 接触点上方100mm
contact_point.describe_space = DescribeSpace::CARTESIAN;
contact_point.pose = {0.5, 0, 0.5, 0, 0, 0}; // 接触点
planner->tpAddPositionLine(approach_point, path_prop, move_prop);
planner->tpAddPositionLine(contact_point, path_prop, move_prop);
// 9. 创建任务
auto task = scene->rlCreateRobotTask({planner_h}, "force_task");
// 10. 控制循环
while (true) {
// 10.1 更新状态(包括力传感器)
state->rsUpdateJointState(q, qd, qdd, torque, temp, friction);
double ft_data[6];
ft_sensor->read(ft_data);
state->rsUpdateFTSensorData(FTSensorType::END_FT_SENSOR, ft_data);
// 10.2 获取轨迹点
std::vector<TrajectoryPoint> traj_points;
PlannerHandle failed_h;
int ret = task->tskUpdateCycle(0.005, traj_points, failed_h);
// 10.3 计算控制指令(位置+力控制)
JointCommand cmd;
state->rsCalJointCommand(cmd);
// 10.4 下发控制指令
hardware->setJointCommand(cmd.position, cmd.velocity, cmd.acceleration, cmd.torque);
// 10.5 监测力控状态
RLWrench contact_force = state->rsGetEndExternalWrenchInEnd();
if (std::abs(contact_force.force[2] + 20) < 1.0) {
std::cout << "Target force reached!" << std::endl;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
5. 设计优势总结
5.1 对比旧架构
| 维度 | 旧架构 (ARALIntface) | 新架构 (Scene-based) |
|---|---|---|
| 代码规模 | 单文件2247行 | 7个模块,平均300行 |
| 职责 | 混乱(所有功能在一个类) | 清晰(每个模块单一职责) |
| 可测试性 | 困难(需要完整初始化) | 简单(模块独立测试) |
| 多机器人 | 不支持(全局状态) | 完美支持(独立实例) |
| 多状态 | 不支持 | 支持(一机多状态) |
| 生命周期 | 手动管理 | 自动级联管理 |
| 类型安全 | 弱(返回int) | 强(Handle+智能指针) |
| 扩展性 | 差(修改影响全局) | 优(模块独立扩展) |
5.2 SOLID原则体现
单一职责原则(SRP): ✅
- Model: 只管参数
- Solver: 只管计算
- State: 只管状态
- Planner: 只管规划
- Task: 只管协调
开闭原则(OCP): ✅
- 添加新的控制算法:扩展Controller,不修改其他模块
- 添加新的规划算法:扩展Planner,不影响Task
里氏替换原则(LSP): ✅
- 所有模块都是接口,可以有多种实现
接口隔离原则(ISP): ✅
- 每个模块只暴露必要的接口
- 用户只依赖所需的模块
依赖倒置原则(DIP): ✅
- 高层(Task)依赖抽象(Planner接口)
- 低层(具体实现)实现抽象
6. 最佳实践建议
6.1 初始化顺序
6.1.1 单机器人场景
1. Scene(场景)
│
2. Model(机器人模型)
│
3. State(状态管理器,依赖Model)
│
4. Planner(规划器,依赖State)
│
5. Task(任务管理器,依赖Planner)
│
6. Controller(控制器,依赖State,可选)
代码示例:
// 1. 创建场景
auto scene = CreateARALScene("my_scene");
// 2. 创建机器人模型
auto model_h = scene->rlCreateRobotModel("aubo_i5", "/path/");
auto model = scene->rlGetRobotModel(model_h);
// 3. 创建状态管理器(Solver会自动创建)
auto state_h = scene->rlCreateRobotState(model_h, "real_state");
auto state = scene->rlGetRobotState(state_h);
auto solver = scene->rlGetRobotSolver(model_h); // Solver可以随时获取
// 4. 创建规划器
auto planner_h = scene->rlCreateRobotPlanner(
{RobotRole{state_h, PlannerRole::MASTER}}, "main_planner");
auto planner = scene->rlGetRobotPlanner(planner_h);
// 5. 创建任务(可选,单Planner也可以不创建Task)
auto task = scene->rlCreateRobotTask({planner_h}, "main_task");
// 6. 创建控制器(如果需要力控等高级功能)
auto controller = scene->rlCreateRobotController(state_h, "force_ctrl");
6.1.2 多机器人同步场景
1. Scene
│
2. Model A, Model B(多个机器人模型)
│
3. State A, State B(各机器人的状态管理器)
│
4. Planner A, Planner B(各机器人的规划器)
│
5. Task(统一管理多个Planner,实现同步)
代码示例:
// 1. 创建场景
auto scene = CreateARALScene("dual_arm_cell");
// 2. 创建两个机器人
auto model_A_h = scene->rlCreateRobotModel("robot_A", path_A);
auto model_B_h = scene->rlCreateRobotModel("robot_B", path_B);
// 3. 创建各自的状态
auto state_A_h = scene->rlCreateRobotState(model_A_h, "state_A");
auto state_B_h = scene->rlCreateRobotState(model_B_h, "state_B");
// 4. 创建各自的规划器
auto planner_A_h = scene->rlCreateRobotPlanner(
{RobotRole{state_A_h, PlannerRole::MASTER}}, "planner_A");
auto planner_B_h = scene->rlCreateRobotPlanner(
{RobotRole{state_B_h, PlannerRole::MASTER}}, "planner_B");
// 5. 创建同步任务
auto task_sync = scene->rlCreateRobotTask(
{planner_A_h, planner_B_h}, "sync_task");
6.2 状态更新频率
- State更新: 200Hz(5ms)- 实时性要求高
- Planner规划: 200Hz(5ms)- 与控制周期一致
- Task采样: 200Hz(5ms)- 与控制周期一致
- Controller计算: 200Hz(5ms)- 与控制周期一致
6.3 错误处理
// 检查返回值
int ret = planner->tpAddPositionLine(target, path_prop, move_prop);
if (ret < 0) {
auto utility = scene->rlGetUtility();
std::string error_msg = utility->rlGetErrorDescription(ret);
std::cerr << "Error: " << error_msg << std::endl;
// 根据错误类型处理
if (ret == E_IK_ANALYTICAL_SOLVER_FAILED) {
// 目标点不可达
} else if (ret == E_PLAN_OUT_OF_JOINT_LIMIT) {
// 超出关节限制
}
}
6.4 资源管理
// 使用智能指针,自动管理生命周期
{
auto scene = CreateARALScene("temp");
auto model_h = scene->rlCreateRobotModel("robot", path);
// ...
} // scene 超出作用域,自动释放所有资源
6.5 线程安全
- ✅ Solver: 完全线程安全(无状态)
- ⚠️ State: 非线程安全(需要外部同步)
- ⚠️ Planner: 非线程安全(单线程使用)
- ⚠️ Task: 非线程安全(单线程使用)
// 多线程使用Solver(安全)
std::thread t1([&]{ solver->kdCalForwardPosition(...); });
std::thread t2([&]{ solver->kdCalInverseDynamics(...); });
// 多线程使用State(需要加锁)
std::mutex state_mutex;
std::thread t1([&]{
std::lock_guard<std::mutex> lock(state_mutex);
state->rsUpdateJointState(...);
});
7. 迁移指南(从旧接口到新接口)
7.1 初始化对比
旧接口:
auto robot = CreateARALIntfacePtrFromFile("aubo_i5", "/path/");
robot->rlInitiateRobotModelFromFiles("aubo_i5", "/path/");
新接口:
auto scene = CreateARALScene("my_scene");
auto model_h = scene->rlCreateRobotModel("aubo_i5", "/path/");
auto model = scene->rlGetRobotModel(model_h);
auto solver = scene->rlGetRobotSolver(model_h);
auto state_h = scene->rlCreateRobotState(model_h, "state");
auto state = scene->rlGetRobotState(state_h);
7.2 运动学计算对比
旧接口:
robot->kdCalForwardPosition(q, T_f_e, false, T_b_e);
新接口:
solver->kdCalForwardPosition(q, T_f_e, false, T_b_e);
7.3 规划对比
旧接口:
robot->tpInitiatePlanner(q, qd, qdd, status);
robot->tpAddPositionLine(point, path_prop, move_prop, tool_workpiece);
robot->tpUpdateCycle(0.005, point);
新接口:
state->rsInitiateRobotState(q, qd, qdd, tool_workpiece);
auto planner_h = scene->rlCreateRobotPlanner({role}, "planner");
auto planner = scene->rlGetRobotPlanner(planner_h);
planner->tpAddPositionLine(point, path_prop, move_prop);
auto task = scene->rlCreateRobotTask({planner_h}, "task");
std::vector<TrajectoryPoint> points;
PlannerHandle failed;
task->tskUpdateCycle(0.005, points, failed);
8. 参考文档
- 多机协同规划方案
- robot_scene.hpp
- robot_model.hpp
- robot_solver.hpp
- robot_state.hpp
- robot_planner.hpp
- robot_task.hpp
- robot_utility.hpp